Момент силы физический смысл. Момент силы. Формула. Понятие. Определение
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора.
В результате взаимодействия магнитного потока Φ с током I 2 , протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I 2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ 2 между током I 2 и э.д.с. ротора. Для уяснения влияния cos Ψ 2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
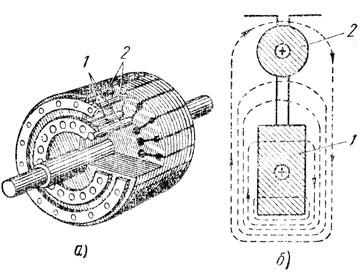
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом "правой руки", определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу "левой руки". Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I 2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I 2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ 2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ 2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы - против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I 2 cos Ψ 2 . Индуктивное сопротивление ротора Х 2 = 2πfL 2 , а следовательно, и величина cos Ψ 2 зависят от частоты тока ротора f 2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I 2 , но и величина cos Ψ 2 . Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I 2 , так и изменением cos Ψ 2 .
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n 0 (1 - S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
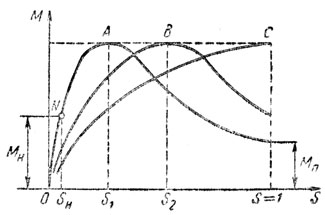
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ 2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S 1 , называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э.д.с. ротора. Если увеличить активное сопротивление цепи ротора, то угол Ψ 2 уменьшится, что приведет к тому, что cos Ψ 2 и вращающий момент двигателя станут больше.
Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят по мере разгона двигателя.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой В на рис. 256). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (S = 1 кривой С).
Вращающий момент, развиваемый асинхронным двигателем, как указывалось, зависит от величины магнитного потека Φ. При снижении приложенного напряжения U 1 уменьшается магнитный поток Φ, а следовательно, и вращающий момент, развиваемый двигателем при данной скорости вращения.
Теория и практика показывают, что вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сети сопровождается резким уменьшением момента.
Кривая А называется естественной механической характеристикой, а кривые В и С - реостатными механическими характеристиками асинхронного двигателя.
Работе двигателя с номинальной нагрузкой соответствует точка N на кривой A.
При скольжении S н двигатель развивает номинальный момент M н.
Ранее было указано, что путем увеличения активного сопротивления цепи роторной обмотки можно увеличить вращающий момент двигателя. Можно было бы сделать роторную обмотку большего сопротивления, но это вызвало бы значительный нагрев обмотки и уменьшение к.п.д. двигателя. Для улучшения пусковых характеристик асинхронных двигателей с короткозамкнутым ротором применяют двигатели с двумя короткозамкнутыми обмотками на роторе и двигатели с глубоким пазом.
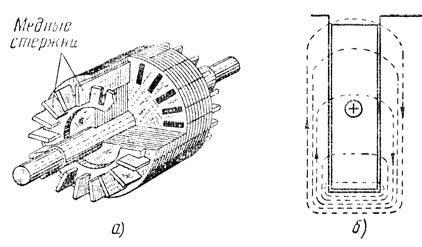
Двигатель с двумя клетками (короткозамкнутыми обмотками) был предложен Доливо-Добровольским. На роторе такого двигателя помещают две клетки (рис. 257): одну - пусковую, имеющую большое активное сопротивление и малое индуктивное сопротивление, и другую - рабочую, обладающую наоборот, малым активным сопротивлением и большим индуктивным сопротивлением.
Стержни пусковой клетки изготовляют обычно из латуни. Материалом рабочей клетки служит медь. Сечение рабочей клетки делается больше сечения пусковой клетки. В результате подбора материала и сечения клеток активное сопротивление пусковой клетки получается в четыре - пять раз больше сопротивления рабочей клетки.
Как видно на рис. 257, б, между стержнями пусковой и рабочей обмоток имеется узкая щель, размеры которой определяют индуктивность нижней рабочей клетки. Рассмотрим работу двуклеточного двигателя.
Индуктивность рабочей клетки больше, так как она сцеплена с большим числом магнитных линий.
В момент пуска двигателя, когда частота токов ротора равна частоте сети, индуктивное сопротивление этой клетки особенно велико. Благодаря этому сдвиг фаз между током рабочей клетки и э.д.с., индуктированной в ней, будет большим, а момент вращения, создаваемый клеткой, - малым. Ввиду большого активного сопротивления и малой индуктивности верхней пусковой клетки ток и э.д.с., индуктированные в ней, будут незначительно сдвинуты по фазе, и вращающий момент, развиваемый пусковой клеткой, будет большим. Следовательно, при пуске вращающий момент двигателя получается преимущественно за счет пусковой клетки.
С увеличением скорости двигателя частота токов ротора уменьшается, индуктивное сопротивление клеток оказывает на работу двигателя все меньшее влияние и поэтому распределение токов в клетках определяется только их активным сопротивлением. Но, как было указано выше, активное сопротивление рабочей клетки в несколько раз меньше сопротивления пусковой клетки. Поэтому при нормальной работе двигателя большая часть тока проходит по рабочей клетке и вращающий момент получается преимущественно за счет рабочей клетки.
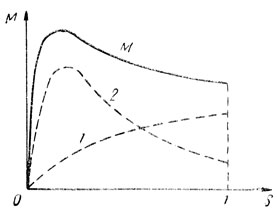
На рис. 258 показана зависимость вращающего момента двигателя с двуклеточным ротором от величины скольжения. На диаграмме кривая 1 показывает изменение момента, создаваемого пусковой обмоткой, кривая 2 - изменение момента, создаваемого рабочей обмоткой. Сумма мгновенных значений моментов двух обмоток дает кривую М момента двуклеточного двигателя.
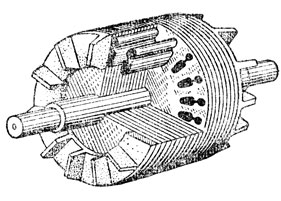
Более простым в изготовлении является ротор, у которого обе клетки заливают алюминием. На рис. 259 показаны внешний вид и частичный разрез ротора с двойной литой алюминиевой клеткой.
Двуклеточный двигатель дороже асинхронного двигателя с короткозамкнутым ротором обычной конструкции на 20-30%. Наши заводы изготовляют двуклеточные двигатели от 5 до 2000 квт.
Наряду с двуклеточным двигателем применяются двигатели с глубоким пазом (рис. 260). Отношение длины паза к ширине берется в пределах 10-12. Нижняя часть паза сцеплена с большим числом магнитных линий, чем верхняя часть паза. Вследствие этого индуктивное сопротивление нижней части паза больше, чем верхней, в особенности в момент пуска. Это приводит к вытеснению тока ротора в верхнюю часть стержней обмотки. Плотность тока в верхних слоях стержня увеличивается, что равносильно уменьшению сечения стержней и увеличению активного сопротивления обмотки. Это, как известно, приводит к увеличению вращающего момента двигателя. Кроме того, увеличение индуктивного и активного сопротивления обмотки ротора вызывает уменьшение пускового тока. С увеличением скорости двигатель приобретает свойства, соответствующие его обычной конструкции.
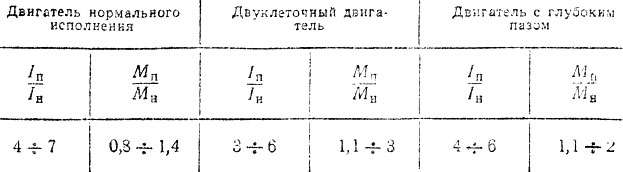
В табл. 11 приведены пусковые характеристики двигателя с короткозамкнутым ротором нормального исполнения, двуклеточного двигателя и двигателя с глубоким пазом. Пусковые свойства даются в виде отношения пускового тока I п к номинальному току I н и в виде отношения пускового момента М n к номинальному моменту М н.
Которая равна произведению силы на ее плечо.
Момент силы вычисляют при помощи формулы:
где F - сила, l — плечо силы.
Плечо силы - это самое короткое расстояние от линии действия силы до оси вращения тела. На рисунке ниже изображено твердое тело, которое может вращаться вокруг оси. Ось вращения этого тела является перпендикулярной к плоскости рисунка и проходит через точку, которая обозначена как буква О. Пле-чом силы F t здесь оказывается расстояние l , от оси вращения до линии действия силы. Определяют его таким образом. Первым шагом проводят линию действия силы, далее из т. О, через которую проходит ось вращения тела, опускают на линию действия силы перпендикуляр. Длина этого перпендикуляра оказывается плечом данной силы.
Момент силы характеризует вращающее действие силы . Это действие зависит как от силы, так и от плеча. Чем больше плечо, тем меньшую силу необходимо приложить, чтобы получить желаемый результат, то есть один и тот же момент силы (см. рис. выше). Именно поэтому открыть дверь, толкая ее возле петель, намного сложнее, чем берясь за ручку, а гайку отвернуть намного легче длинным, чем коротким гаечным ключом.
За единицу момента силы в СИ принимается момент силы в 1 Н , плечо которой равно 1м — ньютон-метр (Н · м).
Правило моментов.
Твердое тело, которое может вращаться вокруг неподвижной оси, находится в равновесии, если момент силы М 1 вращающей его по часовой стрелке, равняется моменту силы М 2 , которая вращает его против часовой стрелки:
Правило моментов есть следствие одной из теорем механики , которая была сформулирована французским ученым П. Вариньоном в 1687 г.
Пара сил.
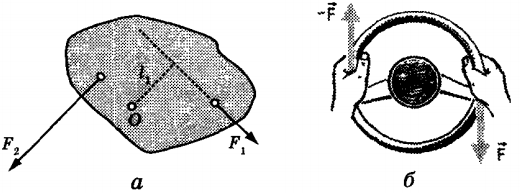
Если на тело действуют 2 равные и противоположно направленные силы, которые не лежат на одной прямой, то такое тело не находится в равновесии, так как результирующий момент этих сил относительно любой оси не равняется нулю, так как обе силы имеют моменты, направленные в одну сторону. Две такие силы, одновременно действующие на тело, называют парой сил . Если тело закреплено на оси, то под действием пары сил оно будет вращаться. Если пара сил приложена «свободному телу, то оно будет вращаться вокруг оси. проходящей через центр тяжести тела, рисунке б .
Момент пары сил одинаков относительно любой оси, перпендикулярной к плоскости пары. Суммарный момент М пары всегда равен произведению одной из сил F на расстояние l между силами, которое называется плечом пары , независимо от того, на какие отрезки l , и разделяет положение оси плечо пары:
Момент нескольких сил, равнодействующая которых равна нулю, будет одинаковым относи-тельно всех осей, параллельных друг другу, поэтому действие всех этих сил на тело можно заме нить действием одной пары сил с тем же моментом.
Момент силы относительно оси или просто момент силы называется проекция силы на прямую, которая перпендикулярна радиусу и проведена в точке приложения силы умноженная на расстояние от этой точки до оси. Либо произведение силы на плечо ее приложения. Плечо в данном случае это расстояние от оси до точки приложения силы. Момент силы характеризует вращательное действие силы на тело. Ось в данном случае это место крепления тела, относительно которого оно может совершать вращение. Если тело не закреплено, то осью вращения можно считать центр масс.
Формула 1 - Момент силы.
F - Сила действующая на тело.
r - Плечо силы.
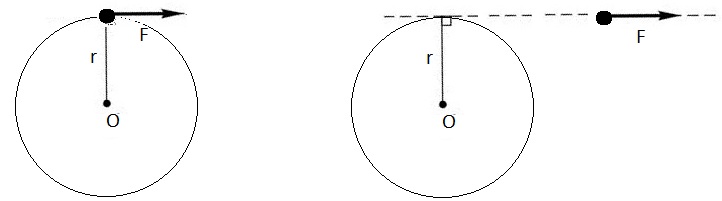
Рисунок 1 - Момент силы.
Как видно из рисунка, плечо силы это расстояние от оси до точки приложения силы. Но это в случае если угол между ними равен 90 градусов. Если это не так, то необходимо вдоль действия силы провести линию и из оси опустить на нее перпендикуляр. Длинна этого перпендикуляра и будет равна плечу силы. А перемещение точки приложения силы вдоль направления силы не меняет ее момента.
Принято считать положительным такой момент силы, который вызывает поворот тела по часовой стрелки относительно точки наблюдения. А отрицательным соответственно вызывающий вращение против нее. Измеряется момент силы в Ньютонах на метр. Один Ньютонометр это сила в 1 Ньютон действующая на плечо в 1 метр.
Если сила, действующая на тело, проходит вдоль лини идущей через ось вращения тела, или центр масс, если тело не имеет оси вращения. То момент силы в этом случае будет равен нулю. Так как эта сила не будет вызывать вращения тела, а попросту будет перемещать его поступательно вдоль лини приложения.
Рисунок 2 - Момент силы равен нулю.
В случае если на тело действует несколько сил, то момент силы будет определять их равнодействующая. К примеру, на тело могут действовать две силы равные по модулю и направленные противоположно. При этом суммарный момент силы будет равен нулю. Так как эти силы будут компенсировать друг друга. Если по простому, то представьте себе детскую карусель. Если один мальчик ее толкает по часовой стрелке, а другой с той же силой против, то карусель останется неподвижной.
§ 92. Вращающий момент асинхронного двигателя
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Φ, так и от силы тока в обмотке ротора I
2 . Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от силы тока в обмотке ротора I
2 , а только от его активной составляющей, т. е. I
2 cos φ 2 , где φ 2 - фазный угол между э. д. с. и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:
M = C ΦI φ 2 cos φ 2 , (122)
где С
- конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора, конструктивного выполнения обмотки и принятой системы единиц.
При условии постоянства приложенного напряжения и изменении нагрузки двигателя магнитный поток остается также почти постоянным.
Таким образом, в выражении вращающего момента величины С
и Φ постоянны и вращающий момент пропорционален только активной составляющей тока в обмотке ротора, т. е.
M ~ I 2 cos φ 2 . (123)
Изменение нагрузки или тормозного момента на валу двигателя, как уже известно, изменяет и скорость вращения ротора, и скольжение.
Изменение скольжения вызывает изменение как силы тока в роторе I
2 , так и ее активной составляющей I
2 cos φ 2 .
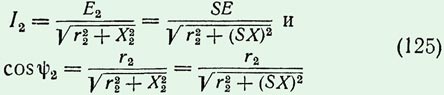
Можно силу тока в роторе определить отношением э. д. с. к полному сопротивлению, т. е. на основании закона Ома
где Z
2 , r
2 и x
2 - полное, активное и реактивное сопротивления фазы обмотки ротора,
E
2 - э. д. с. фазы обмотки вращающегося ротора.
Изменение скольжения изменяет частоту тока ротора. При неподвижном роторе (n
2 = 0 и S
= 1) вращающееся поле с одинаковой скоростью пересекает проводники обмотки статора и ротора и частота тока в роторе равна частоте тока сети (f
2 = f
1). При уменьшении скольжения обмотка ротора пересекается магнитным полем с меньшей частотой, вследствие чего частота тока в роторе уменьшается. Когда ротор вращается синхронно с полем (n
2 = n
1 и S
= 0), проводники обмотки ротора не пересекаются магнитным полем, так что частота тока в роторе равна нулю (f
2 = 0). Таким образом, частота тока в обмотке ротора пропорциональна скольжению, т. е.
f 2 = S f 1 .
Активное сопротивление обмотки ротора почти не зависит от частоты, тогда как э. д. с. и реактивное сопротивление пропорциональны частоте, т. е. изменяются с изменением скольжения и могут быть определены следующими выражениями:
E 2 = S E и X 2 = S X ,
где Е
и X
- э. д. с. и индуктивное сопротивление фазы обмотки для неподвижного ротора соответственно.
Таким образом, имеем:
и вращающий момент
Следовательно, при небольших скольжениях (примерно до 20%), когда реактивное сопротивление Х
2 = S X
мало по сравнению с активным r
2 , увеличение скольжения вызывает увеличение вращающего момента, так как при этом возрастает активная составляющая тока в роторе (I
2 cos φ 2). При больших скольжениях (S X
больше, чем r
2) увеличение скольжения будет вызывать уменьшение вращающего момента.
Таким образом, при увеличении скольжения (его больших значениях) хотя и повышается сила тока в роторе I
2 , но ее активная составляющая I
2 cos φ 2 и, следовательно, вращающий момент уменьшаются вследствие значительного возрастания реактивного сопротивления обмотки ротора.
На рис. 115 показана зависимость вращающего момента от скольжения. При некотором скольжении S
m
(примерно 12 - 20%) двигатель развивает максимальный момент, который определяет перегрузочную способность двигателя и обычно в 2 - 3 раза превышает номинальный момент.
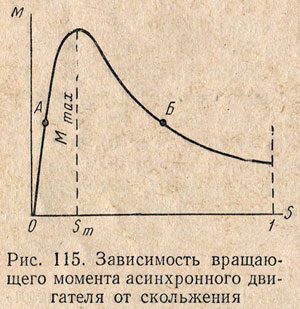
Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости момента от скольжения, т. е. при изменении скольжения в пределах от 0 до S
m
. Работа двигателя на нисходящей ветви указанной кривой, т. е. при скольжении S
> S
m
, невозможна, так как здесь не обеспечивается устойчивое равновесие моментов.
Если предположить, что вращающий момент был равен тормозному (M
вр = M
торм) в точках A
и Б
, то при случайном нарушении равновесия моментов в одном случае оно восстанавливается, а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например, при понижении напряжения сети), тогда скольжение начнет увеличиваться. Если равновесие моментов было в точке А
, то увеличение скольжения вызовет возрастание вращающего момента двигателя и он станет вновь равным тормозному моменту, т. е. равновесие моментов восстановится при возросшем скольжении. Если же равновесие моментов было в точке Б
, то увеличение скольжения вызовет уменьшение вращающего момента, который будет оставаться всегда меньше тормозного, т. е. равновесие моментов не восстановится и скорость вращения ротора будет непрерывно уменьшаться до полной остановки двигателя.
Таким образом, в точке А
машина будет работать устойчиво, а в точке Б
устойчивая работа невозможна.
Если приложить к валу двигателя тормозной момент, больший максимального, то равновесие моментов не восстановится и ротор двигателя остановится.
Вращающий момент двигателя пропорционален квадрату приложенного напряжения, так как пропорциональны напряжению как магнитный поток, так и сила тока в роторе. Поэтому изменение напряжения в сети вызывает изменение вращающего момента.
Моментом силы относительно оси вращения называется физическая величина, равная произведению силы на ее плечо.
Момент силы определяют по формуле:
М - FI , где F - сила, I - плечо силы.
Плечом силы называется кратчайшее расстояние от линии действия силы до оси вращения тела.
На рис. 1.33, а изображено твердое тело, способное вращаться вокруг оси. Ось вращения этого тела перпендикулярна плоскости рисунка и проходит через точку, обозначенную буквой О. Плечом силы F здесь является расстояние 1Хот оси вращения до линии действия силы. Находят его следующим образом. Сначала проводят линию действия силы. Затем из точки О, через которую проходит ось вращения тела, опускают на линию действия силы перпендикуляр. Длина этого перпендикуляра является плечом данной силы.
Момент силы характеризует вращающее действие силы. Это действие зависит как от силы, так и от плеча. Чем больше плечо, тем меньшую силу надо приложить, чтобы получить желаемый результат, т. е. один и тот же момент силы (см. (1.33)). Именно поэтому открыть дверь, толкая ее возле петель, гораздо труднее, чем берясь за ручку, а гайку отвернуть гораздо проще длинным, чем коротким гаечным ключом.
За единицу момента силы в СИ принимается момент силы в 1 Н, плечо которой равно 1м - ньютон-метр (Н м).
Правило моментов
Твердое тело, способное вращаться вокруг неподвижной оси, находится в равновесии, если момент силы М, вращающей его по часовой стрелке, равен моменту силы М2, вращающей его против часовой стрелки:
М1 = -М2 или F 1 ll = - F 2 l 2 .
Правило моментов является следствием одной из теорем механики, сформулированной французским ученым П. Вариньоном в 1687 г.
Если на тело действуют две равные и противоположно направленные силы, не лежащие на одной прямой, то такое тело не находится в равновесии, поскольку результирующий момент этих сил относительно любой оси не равен нулю, т. к. обе силы имеют моменты, направленные в одну сторону. Две такие силы, одновременно действующие на тело, называют парой сил. Если тело закреплено на оси, то под действием пары сил оно будет вращаться. Если пара сил приложена ксвободному телу, то оно будет вращаться вокруг оси, проходящей через центр тяжести тела, рис. 1.33, б.
Момент пары сил одинаков относительно любой оси, перпендикулярной к плоскости пары. Суммарный момент М пары всегда равен произведению одной из сил F на расстояние I между силами, которое называется плечом пары,независимо от того, на какие отрезки и /2 разделяет положение оси плечо пары:
M = Fll + Fl2=F(l1 + l2) = Fl.
Момент нескольких сил, равнодействующая которых равна нулю, будет одинаковым относительно всех осей, параллельных друг другу, поэтому действие всех этих сил на тело можно заменить действием одной пары сил с тем же моментом.