Двигатель параллельного возбуждения. Двигатель постоянного тока с параллельным возбуждением
Как и в случае генератора, обмотки индуктора и якоря двигателя могут быть соединены либо последовательно (рис.339), либо параллельно (рис.340). В первом случае двигатель называют двигателем с последовательным возбуждением (или сериесным двигателем), во втором – двигателем с параллельным возбуждением (или шунтовым двигателем). Применяются также двигатели со смешанным возбуждением (компаунд-двигатели), в которых часть обмоток индуктора соединена с якорем последовательно, а часть параллельно. Каждый из этих типов двигателей имеет свои особенности, делающие его применение целесообразным в одних случаях и нецелесообразным в других.
1. Двигатели с параллельным возбуждением. Схема включения в сеть двигателей этого типа показана на рис. 361. Так как здесь цепи якоря и индуктора не зависят друг от друга, то ток в них можно регулировать независимо при помощи отдельных реостатов, включенных в эти цепи. Реостат , включенный в цепь якоря, называют пусковым, а реостат , включенный в цепь индуктора, – регулировочным. При пуске в ход двигателя с параллельным возбуждением пусковой реостат должен быть обязательно полностью включен; по мере того как двигатель набирает частоту вращения, сопротивление реостата постепенно уменьшают и при достижении нормальной частоты вращения этот реостат выводится из цепи полностью. Двигатели с параллельным возбуждением, особенно значительной мощности, ни в коем случае нельзя включать без пускового реостата. Точно так же при выключении двигателя следует сначала постепенно ввести реостат и лишь после этого выключить рубильник, соединяющий двигатель с сетью.
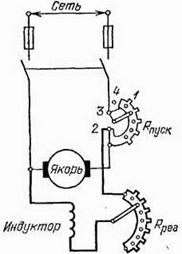
Рис. 361. Схема включения двигателя с параллельным возбуждением. Латунная дуга 1, по которой движется рычаг пускового реостата, через зажим 2 присоединена к концу регулировочного реостата, а через зажим 3 – к пусковому реостату. Это делается для того, чтобы при переводе пускового реостата на холостой контакт 4 и выключении тока цепь возбуждения не разрывалась
Нетрудно понять соображения, которыми вызваны эти правила включения и выключения двигателей. Мы видели (см. формулу (172.1)), что ток в якоре
![]() ,
,
где – напряжение сети, а - э. д. с., индуцированная в обмотках якоря. В первый момент, когда двигатель еще не успел раскрутиться и набрать достаточную частоту вращения, э. д. с. очень мала и ток через якорь приближенно равен
Сопротивление якоря обычно очень мало. Оно рассчитывается так, чтобы падение напряжения на якоре не превышало 5-10 % от напряжения сети, на которое рассчитан двигатель. Поэтому при отсутствии пускового реостата ток в первые секунды мог бы в 10-20 раз превысить нормальный ток, на который рассчитан двигатель при полной нагрузке, а это для него очень опасно. При введенном же пусковом реостате с сопротивлением пусковой ток через якорь
![]() . (173.1)
. (173.1)
Сопротивление пускового реостата подбирают так, чтобы пусковой ток превышал нормальный не больше чем в 1,5-2 раза.
Поясним сказанное числовым примером. Положим, что мы имеем двигатель мощности 1,2 кВт, рассчитанный на напряжение 120 В и имеющий сопротивление якоря . Ток через якорь при полной нагрузке
![]() .
.
Если бы мы включили этот двигатель в сеть без пускового реостата, то в первые секунды пусковой ток через якорь имел бы значение
![]() ,
,
в 10 раз превышающее нормальный рабочий ток в якоре. Если же мы хотим, чтобы пусковой ток превышал нормальный не больше, чем в 2 раза, т. е. был равен 20 А, то мы должны подобрать пусковое сопротивление таким, чтобы имело место равенство
откуда Ом.
Ясно также, что для шунтового двигателя очень опасна внезапная его остановка без выключения, например вследствие резкого возрастания нагрузки, так как при этом э. д. с. падает до нуля и ток в якоре возрастает настолько, что избыток выделяемого в нем джоулева тепла может привести к расплавлению изоляции или даже самих проводов обмотки (двигатель «перегорает»).
Регулировочный реостат , включенный в цепь индуктора, служит для того, чтобы изменять частоту вращения двигателя. Увеличивая или уменьшая сопротивление цепи индуктора с помощью этого реостата, мы изменяем ток в цепи индуктора, а тем самым и магнитное поле, в котором вращается якорь. Мы видели выше, что при заданной нагрузке двигателя ток в нем автоматически устанавливается такой, чтобы возникающий вращающий момент уравновешивал тормозящий вращающий момент, создаваемый нагрузкой двигателя. Это осуществляется благодаря тому, что индуцированная э. д. с. достигает соответствующего значения. Но индуцированная э. д. с. определяется, с одной стороны, магнитной индукцией, а с другой, – частотой вращения якоря.
Чем больше магнитный поток индуктора, тем меньше должна быть частота вращения двигателя, чтобы получить определенное значение э. д. с., и, наоборот, чем слабее магнитный поток, тем больше должна быть частота вращения. Поэтому, для того чтобы при заданной нагрузке увеличить частоту вращения шунтового двигателя, нужно ослабить магнитный поток в индукторе, т. е. ввести большее сопротивление в цепь индуктора при помощи регулировочного реостата. Напротив, чтобы уменьшить частоту вращения шунтового двигателя, нужно увеличить магнитный поток в индукторе, т. е. уменьшить сопротивление в цепи индуктора, выводя регулировочный реостат.
С помощью регулировочного реостата можно при нормальном напряжении и отсутствии нагрузки установить нормальную частоту вращения двигателя. При возрастании нагрузки ток в якоре должен возрастать, а индуцированная в нем э. д. с. – уменьшаться. Это происходит вследствие некоторого уменьшения частоты вращения якоря. Однако уменьшение частоты вращения, обусловленное возрастанием нагрузки от нуля до нормальной мощности двигателя, обычно очень незначительно и не превышает 5-10 % от нормальной частоты вращения двигателя. Это обусловлено главным образом тем, что в двигателях с параллельным возбуждением ток в индукторе не изменяется при изменении тока в якоре. Если бы при изменениях нагрузки мы хотели поддерживать прежнюю частоту вращения, то это можно было бы осуществить, несколько изменяя с помощью регулировочного реостата ток в цепи индуктора.
Таким образом, с эксплуатационной точки зрения двигатели постоянного тока с параллельным возбуждением (шунтовые двигатели) характеризуются следующими двумя свойствами: а) частота их вращения при изменении нагрузки остается почти постоянной; б) частоту их вращения можно в широких пределах изменять с помощью регулировочного реостата. Поэтому такие двигатели довольно широко применяются в промышленности там, где обе указанные их особенности имеют значение, например для приведения в действие токарных и других станков, частота вращения которых не должна сильно зависеть от нагрузки.
173.1. На рис. 362 показана схема шунтового двигателя с так называемым комбинированным пуско-регулировочным реостатом. Разберитесь в этой схеме и объясните, какую роль играют отдельные части этого реостата.
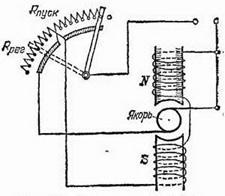
Рис. 362. К упражнению 173.1
173.2. Нужно пустить в ход шунтовый двигатель. Для этого даны два реостата: один из толстой проволоки с малым сопротивлением, другой из тонкой проволоки с большим сопротивлением. Какой из этих реостатов следует включить как пусковой и какой как регулировочный? Почему?
2. Двигатели с последовательным возбуждением. Схема включения в сеть этих двигателей показана на рис. 363. Здесь ток якоря является в то же время и током индуктора, и потому пусковой реостат изменяет и ток в якоре, и ток в индукторе. При холостом ходе или очень малых нагрузках ток в якоре, как мы знаем, должен быть очень мал, т. е. индуцированная э. д. с. должна быть почти равна напряжению сети. Но при очень малом токе через якорь и индуктор слабо и поле индуктора. Поэтому при малой нагрузке необходимая э. д. с. может быть получена только за счет очень большой частоты вращения двигателя. Вследствие этого при очень малых токах (малой нагрузке) частота вращения двигателя с последовательным возбуждением становится настолько большой, что это может стать опасным с точки зрения механической прочности двигателя.
![]()
Рис. 363. Схема включения двигателя с последовательным возбуждением
Говорят, что двигатель идет «вразнос». Это недопустимо, и поэтому двигатели с последовательным возбуждением нельзя пускать в ход без нагрузки или с малой нагрузкой (меньшей 20-25 % от нормальной мощности двигателя). По этой же причине не рекомендуется соединять эти двигатели со станками или другими машинами ременными или канатными передачами, так как обрыв или случайный сброс ремня приведет к «разносу» двигателя. Таким образом, в двигателях с последовательным возбуждением при возрастании нагрузки увеличиваются ток в якоре и магнитное поле индуктора; поэтому частота вращения двигателя резко падает, а развиваемый им вращающий момент резко возрастает.
Эти свойства двигателей с последовательным возбуждением делают их наиболее удобными для применения на транспорте (трамваи, троллейбусы, электропоезда) и в подъемных устройствах (кранах), так как в этих случаях необходимо иметь в момент пуска при очень большой нагрузке большие вращающие моменты при малых частотах вращения, а при меньших нагрузках (на нормальном ходу) меньшие моменты и большие частоты.
Регулирование частоты вращения двигателя с последовательным возбуждением производится обычно регулировочным реостатом, включенным, параллельно обмоткам индуктора (рис. 364). Чем меньше сопротивление этого реостата, тем большая часть тока якоря ответвляется в него и тем меньший ток идет через обмотки индуктора. Но при уменьшении тока в индукторе частота вращения двигателя возрастает, а при его увеличении падает. Поэтому, в отличие от того, что имело место для шунтового двигателя, для того чтобы увеличить частоту вращения сериесного двигателя, нужно уменьшить сопротивление цепи индуктора, выводя регулировочный реостат. Для того чтобы уменьшить частоту вращения сериесного двигателя, нужно увеличить сопротивление цепи индуктора, вводя регулировочный реостат.
![]()
Рис. 364. Схема включения реостата для регулирования частоты вращения сериесного двигателя
173.3. Объясните, почему сериесный двигатель нельзя пускать вхолостую или с малой нагрузкой, а шунтовый можно.
Таблица 8. Преимущества, недостатки и области применения двигателей различных типов
|
Тип двигателя |
Основные преимущества |
Основные недостатки |
Область применения |
|
Трехфазный двигатель переменного тока с вращающимся полем |
1. Слабая зависимость частоты вращения от нагрузки 2. Простота и экономичность конструкции 3. Применение трехфазного тока |
1. Трудность регулирования частоты вращения 2. Малый вращающий момент при пуске |
Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки, но не нуждающиеся в регулировке частоты вращения |
|
Двигатель постоянного тока с параллельным возбуждением (шунтовый) |
1. Постоянство частоты вращения при изменениях нагрузки 2. Возможность регулирования частоты вращения |
Малый вращающий момент при пуске |
Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки и возможности регулировать частоту вращения |
|
Двигатель постоянного тока с последовательным возбуждением (сериесный) |
Большой вращающий момент при пуске |
Сильная зависимость частоты вращения от нагрузки |
Тяговые двигатели в трамваях и электропоездах, крановые двигатели |
В заключение сопоставим в виде табл. 8 основные преимущества и недостатки различных типов электродвигателей, рассмотренных нами в этой главе, и области их применения.
Министерство науки и образования Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
Национальный исследовательский
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Электроснабжения и Электротехники
Двигатель постоянного тока параллельного возбуждения
Отчет по лабораторной работе №9
по дисциплине «Общая электротехника и электроника»
Выполнил
Студент СМо-11-1 ________ Дергунов А.С. __________
(подпись) Фамилия И.О. (дата)
Доцент каф. Э и ЭТ ________ Кирюхин Ю.А. __________
(подпись) Фамилия И.О. (дата)
Иркутск 2012
Цель работы 3
Задание 3
Краткие теоретические сведения 3
Оборудование электрической установки 5
Порядок выполнения работы 6
Ответы контрольные вопросы 9
Цель работы
Ознакомиться с устройством и работой двигателя постоянного тока параллельного возбуждения и исследовать его характеристики.
Задание
Ознакомиться с конструкцией и принципом работы двигателя постоянного тока параллельного возбуждения. Ознакомиться со схемой включения двигателя параллельного возбуждения. Ознакомиться с условиями пуска двигателя параллельного возбуждения. Ознакомиться со способами регулирования частоты вращения двигателя. Исследовать двигатель в режиме холостого хода. Построить регулировочную характеристику. Исследовать двигатель при нагрузке. Построить рабочие и механические характеристики.
Краткие теоретические сведения
В
двигателе параллельного возбуждения
обмотку возбуждения включают параллельно
обмотке якоря (см. рис. 1). Величина тока
в обмотке возбуждения
меньше тока якоря и составляет 2 – 5% от
и составляет 2 – 5% от .
.
Эксплуатационные свойства двигателей оцениваются рабочими, механическими и регулировочными характеристиками.

Рис. 1
На
рис. 8 показаны рабочие
характеристики двигателя параллельного
возбуждения: зависимость частоты
вращения
 ,
величины тока якоря,
вращающего момента
,
величины тока якоря,
вращающего момента ,
коэффициента полезного действия
,
коэффициента полезного действия и потребляемой из сети мощности
и потребляемой из сети мощности от
полезной мощности
от
полезной мощности при неизменных напряжении
при неизменных напряжении и токе возбуждения
и токе возбуждения .
.

Рис. 2
Механическая
характеристика двигателя представляет
собой зависимость частоты вращения
якоря от момента на валу при неизменных
напряжении и сопротивлении цепи
возбуждения
 .
Она показывает влияние механической
нагрузки на валу двигателя на частоту
вращения, что особенно важно знать при
выборе и эксплуатации двигателей.
Механические характеристики могут быть
естественными и искусственными.
Характеристика двигателя при номинальных
.
Она показывает влияние механической
нагрузки на валу двигателя на частоту
вращения, что особенно важно знать при
выборе и эксплуатации двигателей.
Механические характеристики могут быть
естественными и искусственными.
Характеристика двигателя при номинальных ,
, и сопротивлении
и сопротивлении называется естественной. Формула для
частоты вращения двигателя:
называется естественной. Формула для
частоты вращения двигателя:

Уравнение механической характеристики:
 ,
(1)
,
(1)
где
 – частота вращения при идеальном
холостом ходе (
– частота вращения при идеальном
холостом ходе ( );
);
 –изменение
частоты вращения, вызванное действием
нагрузки.
–изменение
частоты вращения, вызванное действием
нагрузки.
Так
как у двигателей постоянного тока
сопротивление обмотки якоря
 мало, то с увеличением нагрузки на валу
частота вращенияn
изменяется незначительно. Характеристики
подобного типа называются жесткими.
мало, то с увеличением нагрузки на валу
частота вращенияn
изменяется незначительно. Характеристики
подобного типа называются жесткими.
Если
пренебречь размагничивающим действием
реакции якоря и принять
 ,
то естественная механическая характеристика
двигателя параллельного возбуждения
имеет вид прямой, слабо наклонной к оси
абсцисс (рис.3, прямая 1).
,
то естественная механическая характеристика
двигателя параллельного возбуждения
имеет вид прямой, слабо наклонной к оси
абсцисс (рис.3, прямая 1).
Если
в цепь якоря двигателя ввести
пускорегулировочный реостат
 ,
то зависимость
,
то зависимость будет определяться выражением
будет определяться выражением

 .
(2)
.
(2)
Частота
вращения при идеальном холостом ходе
 остается неизменной, а изменение частоты
вращения
остается неизменной, а изменение частоты
вращения увели-чивается, и угол наклона механической
характеристики к оси абсцисс возрастает
(рис. 3, прямая 2). Полученная таким образом
механическая характеристика называетсяискусственной
.
увели-чивается, и угол наклона механической
характеристики к оси абсцисс возрастает
(рис. 3, прямая 2). Полученная таким образом
механическая характеристика называетсяискусственной
.
Принудительное изменение частоты вращения двигателя при постоянном моменте нагрузки на валу называется регулированием. Рис. 3
Регулирование частоты вращения в двигателях параллельного возбуждения возможно двумя способами: изменением магнитного потока и изменением сопротивления в цепи якоря.
Р егулирование
частоты вращения изменением сопротивления
в цепи якоря осуществляется при помощи
пуско-регулировочного реостата.
При увеличении сопротивлениячастота вращения уменьшается по формуле
(2). Этот способ неэкономичен, так как
сопровождается значительными потерями
на нагрев реостата.
егулирование
частоты вращения изменением сопротивления
в цепи якоря осуществляется при помощи
пуско-регулировочного реостата.
При увеличении сопротивлениячастота вращения уменьшается по формуле
(2). Этот способ неэкономичен, так как
сопровождается значительными потерями
на нагрев реостата.
Регулирование
частоты вращения изменением магнитного
потока осуществ-ляется посредством
реостата
,
включен-ного в обмотку возбуждения
(см.рис.1).
Рис.
10
Рис.
4
При
увеличении
уменьшается ток в обмотке возбуждения,
уменьшается магнитный поток ,
что вызывает увеличение частоты вращения.
,
что вызывает увеличение частоты вращения.
При
малых значениях тока возбуждения, а тем
более при обрыве цепи возбуждения ( ),
то есть при незначительном магнитном
потоке,
частота вращения резко увеличивается,
что ведет к «разносу» двигателя и к его
механическому разрушению. Поэтому очень
важно следить за тем, чтобы все
электрические соединения в цепи
возбуждения были надежны.
),
то есть при незначительном магнитном
потоке,
частота вращения резко увеличивается,
что ведет к «разносу» двигателя и к его
механическому разрушению. Поэтому очень
важно следить за тем, чтобы все
электрические соединения в цепи
возбуждения были надежны.
Зависимость частоты вращения от тока возбуждения называется регулировочной характеристикой двигателя (см. рис. 4).
Регулирование
частоты вращения изменением магнитного
потока
очень экономично, но не всегда приемлемо,
так как при изменениизначительно меняется жесткость
механических характеристик.
Двигатели параллельного возбуждения благодаря линейности и «жесткости» механических характеристик, а также возможности плавного регулирования скорости вращения в широких пределах, получили распространение как в силовом электроприводе (для механизмов и станков), так и в системах автоматического управления.
Электрические машины постоянного тока.
Генератор с параллельным возбуждением.
Расчётные формулы:
Ток отдаваемый генератором в сеть:
Эдс. генератора: Е= U+Iя ∙Rя.
Мощность отдаваемая сети: Р2 = U∙I =I 2 ∙R
Мощность приводного двигателя: Р1 = Р2/ η
Мощность потерь в обмотке якоря:
Ря = I 2 я∙ Rя
Мощность потерь в обмотке возбуждения:
Рв = U ∙Iв = I 2 в∙ Rв
Суммарные потери: ΣР = Р1 – …
Р2 .
Коэффициент полезного действия генератора:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Двигатель с параллельным возбуждением.

Расчётные формулы:
Ток двигателя: I = Iя + Iв
Напряжение двигателя: U = E + Iя ∙Rя.
Мощность потребляемая от сети: Р1 = U∙I
Мощность на валу: Р 2 = Р 1 ∙η
Момент на валу двигателя:
М = 9550∙ Р 2 / n 2 .
Коэффициент полезного действия двигателя:
η = Р 2 /Р 1 = (U∙I- ΣР) / U∙I
Пример 6.1. Генератор постоянного тока с параллельным возбуждением развивает номинальное напряжение Uн =220 В. Генератор нагружен на нагрузку Rн = 2,2 Ом. Сопротивление обмотки якоря Rя = 0,2 Ом, обмотки возбуждения Rв =220 Ом. КПД генератора η = 0,87. Определить следующие величины:
1.ток нагрузки; 2. ток якоря; 3. ток возбуждения; 4. эдс генератора;
5.полезную мощность; 6. потребляемую мощность; 7. суммарные потери в генераторе; 8. потери в обмотке якоря; 9. потери в обмотке возбуждения.
1.Ток нагрузки:

2.Ток возбуждения:
![]()
3.Ток якоря: Iя = I – Iв = 100 – 1= 99 А.
4.Эдс генератора:
Е = U+ Iя ∙Rя = 220 + 99∙0,1 = 229,9 В.
5.Полезная мощность:
Р2 = Uн∙I = 220∙100 = 22000 Вт = 22 кВт.
6.Потребляемая мощность:
7.Суммарные потери в генераторе:
ΣР = Р1– Р2 = 25,87 – 22 = 3,87 кВт.
8.Потери в обмотке якоря:
Ря = Iя 2 ∙Rя = 99 2 ∙0,2 = 1960,2 Вт.
9.Потери в обмотке возбуждения:
Рв = Uн∙Iв = 220∙1 = 220 Вт.
Ответ: I = 100А; Iв = 1 А; Iя = 99 А; Е = 229,9 В; Р2 = 22 кВт;
Р1 = 25,87 кВт; ΣР = 3,87 кВт; Ря = 1960,2 Вт; Рв = 220 Вт.
Пример 6.2. Рис.8.2.Двигатель постоянного токапараллельного возбуждения работает от сети Uн = 220 В. Частота вращения якоря n2 = 1450 об/мин. Ток двигателя I = 500 А, противо–эдс якоря Е = 202 В, сопротивление обмотки возбуждения Rв = 44 Ом. Кпд двигателя
η = 0,88. Определить:1.ток возбуждения; 2.ток якоря; 3. сопротивление обмотки якоря; 4.потребляемую мощность; 5.полезную мощность на валу; 6 Суммарные потери в двигателе; 7.потери в обмотке якоря; 8.потери в обмотке якоря; 9.вращающий момент на валу.
1. Ток возбуждения:
![]()
2. Ток якоря:
Iя = I – Iв = 500 –5 = 495 А.
3. Сопротивление обмотки якоря:
4. Потребляемая мощность от сети:
Р1 = Uн∙I = 220 ∙500 = 110 000 Вт = 110 кВт.
5. Полезная мощность на валу:
Р2 = P1∙ η = 110 ∙ 0,87 = 95,7 кВт.
6. Суммарные потери в двигателе:
ΣР = Р1 – P2 = 110 – 95,7 = 14,3 кВт.